Challenge
Our customer is a leading manufacturer of industrial automation systems and are always keen to understand what new technologies exist in the market that can give them and their customers an edge. To this end, we arranged a lunch and learn session at their premises, alongside PHD, to showcase the range of standard and special products applicable to the Automotive industry.
Engagement
During the session, we engaged with a project manager who was working with a prestigious automotive company, to help them find a solution to automate a specific operation within a machining cell. They had a requirement for a gripper to act as a robot end effector, which could be pneumatically actuated to open and close, but which clamped the part with mechanical force throughout the machining operation with the air supply removed.
We presented the GRM1 Miniature Clamp, showing how it operated and the functionality it enabled, and it was quickly apparent that this could the solution they needed. It would however, need to be modified to integrate it to the system.
PSI, PHD and the customer collaborated closely over a 16 week period to develop the final solution. During this period, we took the time to understand the application in detail and what was required to meet their very specific criteria. The application parameters changed a few times through this process, but the GRM1 continued to meet the challenge.
Solution
The solution required tip adjustment functionality and to be resilient to the dusty environment in which it would be required to work. Having developed a prototype solution, operational trials were carried out on the system at our customers facility and all expectations were met. This success resulted in a requirement for 64 grippers over the following 2 months.
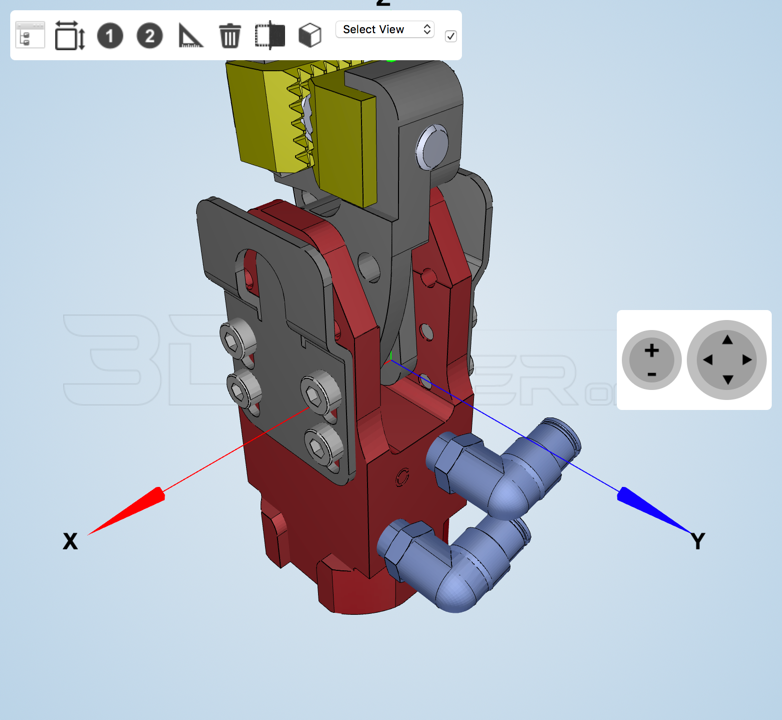
Ultimately, we were able to use a standard GRM1 miniature clamp as a basis, with a modification to the jaws to allow for tip adjustment, and the most robust option for fluoro-elastomer seals to deliver long life in the dusty environment. PHD supplied a robust solution which requires minimal maintenance, long life and met the customers’ requirements to replace out dated manual toggle clamps on their existing robotic end of arm tooling. The original solution required time consuming manual loading and was prone to inconsistent machining due to wear within the toggle clamps and inaccurate parts positioning.
Benefits
The robust, high-quality solution met the specific operational criteria from the customer while also delivering a package that allowed for a reduction in size and weight of the end of arm tooling. Since the installation the customer has seen a reduction in maintenance downtime and eliminated scrapped parts. The new solution has increased production as a result and improved the consistency of machined dimensions and overall quality of the final product.